过冲
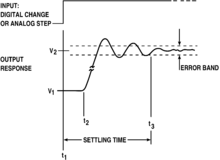
过冲示意图,伴有振铃和安定时间。
在信号处理、控制理论、电子学以及数学中,过冲(英语:overshoot),也称超调[1],是指信号或者函数超过了预期值,是暫態響應的特性之一。常见于类似低通滤波器的频带限制系统中阶跃响应阶段,通常会跟随有伴生的振铃。
目录
1 定义
2 控制理论
3 电子学
4 数学
5 信号处理
6 相关概念
7 参见
8 参考资料
定义
在尾形克彦的《离散时间控制系统》中,最大过冲量被定义为:“从系统期望响应值计算,响应曲线的最大峰值”。[2]
控制理论
在控制理论中,过冲是指输出超过了它的最终稳态值。[3]
对于阶跃输入,过冲率(percentage overshoot, PO)是指过冲最大值减去阶跃值再除以阶跃值。在单位阶跃中,过冲是最大阶跃响应值减一。
过冲率是基于阻尼系数 ζ 的函数:
- PO=100%⋅e(−ζπ1−ζ2){displaystyle PO=100%cdot e^{left({frac {-zeta pi }{sqrt {1-zeta ^{2}}}}right)}}

阻尼系数可表示为:
- ζ=(lnPO)2π2+(lnPO)2{displaystyle zeta ={sqrt {frac {(ln PO)^{2}}{pi ^{2}+(ln PO)^{2}}}}}

电子学

电子信号中过冲与下冲。
在电子学中,过冲是指,从一个值转变到另一个值时,任何参数的瞬时值超过它的最终(稳态)值。过冲在放大器的输出信号中有重要的意义。[4]
惯例: 过冲发生于瞬时值超过最终值。当瞬时值低于最终值时,也称为“下冲(undershoot)”。
一般电路设计,多半會使上升时间最小化,同時也將失真限制在可接受范围内。
- 过冲表现为信号的失真。
- 在电路设计中,最小化过冲与减小上升时间的目标会发生冲突。
- 过冲的大小依赖于经历阻尼现象的时间。
- 过冲通常伴有安定时间,即输出到达稳态的时长。
数学
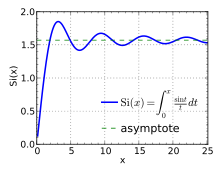
正弦積分可以用來表示过冲
在函數近似時,过冲也是用來描述近似品質的一個特點。若一函數(例如方波)用許多函數的和(例如傅里叶级数或是正交多項式展開)來表示時,在原函數轉折的部份可能就會有过冲、下沖及振鈴的情形。若多項式的項次越多,近似函數和原函數的偏差也會減緩。不過近似項次越多,振盪週期會變長,但其振幅卻不會改變[5],這就是吉布斯现象。在傅里叶变换中,這可以用在一定頻率以下的函數近似阶跃函数來表示,結果會得到正弦積分。可以用和Sinc函数的卷積來表示,在信號處理中,這是低通滤波器。
信号处理

(圖下方的)过冲,是因為用非銳化濾鏡來銳化影相所造成
正弦積分是理想低通濾波器的階躍響應
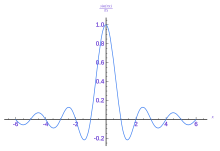
Sinc函数是理想低通濾波器的冲激响应
信号处理中的过冲是指一濾波器輸出的最大值比輸入的最大值大,特別是針對階躍響應,而且經常會伴隨振鈴效應。
像是用Sinc滤波器(例如用矩形低通滤波器)就會出現過沖的情形,其階躍響應為正弦積分
其过沖及下沖可以用這個方式來說明:一般變換的核函數會經過正規化,使其積分為一,因此將常數函數轉換會得到原常數函數,不會有額外的增益。在某一點的卷積是輸入信號的线性组合,再以核函數的值為其(加權)係數。若核函數沒有負值(例如高斯函数),則濾波後信號的數值會是輸入信號的凸组合(核函數積分為一,而且數值非負),因此會在最大值和最小值之間,此值不會有過沖也不會有下沖。不過若核函數有負值(例如Sinc函数),濾波後信號的數值會是輸入信號的仿射組合,輸出數值就可能在輸入信號的最大值及最小值以外,因此會有過沖及下沖的情形。
一般來說过沖是不好的,尤其是會造成削波的情形下,不過有時若要銳化影像,會需要过沖,因為會增加锐度。
相关概念
与过冲非常相关的是振铃,它紧随过冲发生,信号会跌落到低于稳态值,然后可能会反弹到高于稳态,这个过程可能持续一段时间,直到稳定接近于稳态。振铃持续的时间也叫做安定时间。
在社会生态学中,有类似的过冲的概念,是指人口数超过系统的承受容量。
参见
- 阶跃响应
- 振铃
- 安定时间
- 阻尼
- 積分飽和
参考资料
^ 电工名词审定委员会. 电工名词. 科学出版社. 1998. ISBN 7-03-006721-5.
^ 尾形克彦. Discrete-time control systems. Prentice-Hall. 1987: 344. ISBN 0132161028.
^
Kuo, Benjamin C & Golnaraghi M F. Automatic control systems Eighth edition. NY: Wiley. 2003: §7.3 p. 236–237. ISBN 0471134767. 引文格式1维护:冗余文本 (link)
^
Phillip E Allen & Holberg D R. CMOS analog circuit design Second edition. NY: Oxford University Press. 2002. Appendix C2, p. 771. ISBN 0-19-511644-5. 引文格式1维护:冗余文本 (link)
^
Gerald B Folland. Fourier analysis and its application. Pacific Grove, Calif.: Wadsworth: Brooks/Cole. 1992: 60–61. ISBN 0-534-17094-3.


